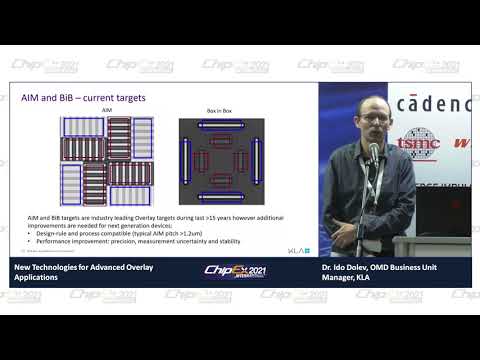
[0:00]אני הולך לדבר על טכנולוגיות חדשות, הרבה מאוד אינוונשן, בתחום שנקרא אברליי. אני אסביר גם מה זה אברליי, אני מניח שלא כל הקהל מכיר את זה. לפני שנתחיל אז רק נציין מספר אנשים שעמלו קשה בשביל לייצר את הטכנולוגיה הזאתי. יש עוד הרבה אנשים ברקע שעובדים על זה, אבל בייחוד שווה להזכיר את דוקטור יואל פלר ודוקטור מרק גינובקר מכאלה שזה זה זה את רוב עבודתם. אני ארוץ ככה מאוד בזריזות ואני אני אציג את קיי ליי, אני לא בטוח שכולם פה מכירים. שתיים שלוש דקות נציג את קיי ליי, את האתגרים שעומדים בפנינו וקיי ליי ישראל ספציפית. ואחר כך נעבור לדבר בעצם על התפקיד שלנו בפרוסס קונטרול, מה זה אוברליי? וטכנולוגיות חדשות, טכנולוגיות של מטרות חדשות שאנחנו כרגע מכניסים לשוק. נראה קצת תיאוריה, נראה סימולציות וגם תוצאות של מדידה אמיתיות ובזה נסכם. אז אז בואו נתחיל אז אז חברה היא חברה גלובלית, ה נמצה ב ולי באמריקה. יש לנו סדר גודל של 60,000 מכונות שכל מכונה זה כמובן לא מכונה בכף היד. זה חצי חדר סדר גודל, 6 ביליון דולר ב-2020. ומבחינת השקעה בR&D אז התייחסו לזה בהרצאה הקודמת, בארבע שנים האחרונות באזור השלושה ביליון דולר. אנחנו משקיעים די הרבה אם לא הרבה מאוד אפילו ב-R&D ואני אדבר על מה מגביל אותנו שם בימים האלו. קצת איפה אנחנו נמצאים בפרמידת הויו כמו שאנחנו קוראים לזה. אז אז כולם פה מכירים את החברות של האלקטרוניקה והסמיקונדקטורס. אם זה סמסונג, אינטל, וכול מעליהם יש נדבח נוסף, החברות של הפאמפט. כמו עם סקרים, ו שהם מיצרים את המכונות תהליך מכונות היצור. יש עוד נדבח שהוא סופר חשוב בתהליכים בפב, בעצם הפרוסס קונטרול היכולת להסתכל ולראות מה קורה בתהליך. ושם הקליי בעצם זה השחקן הדומיננטי. ואם נסתכל ספציפית אז קליי ישראל היא שחקן סופר דומיננטי בתוך בתוך השוק הזה, וזאת באמת באמת גאווה. אז מה יש לנו בקליי ישראל? יש סדר גודל של 1,500 עובדים, פחות או יותר. סדר גודל של מיליון מיליארד דולר סליחה, יצו שנתי. זה משהו שהוא משמעותי ברמת המדינה. משקיעים עוד פעם הרבה מאוד ב-R&D ברמה הלוקאלית. ובעצם מצחיק להגיד אבל כסף זה לא המגבלה כרגע. בעצם מה שמגביל אותנו ביכולת לגדול זה טלנט ועובדים. עובדים מוכשרים, יש לנו הרבה מאוד משרות שגייסנו בשנה האחרונה וממשיכים לגייס. ובעצם זה מה שיביא את הפתרונות לתעשייה בשנים קדימה. עובדים גם לוקאלית עם הרבה מאוד ספקים, חלקם חלקם נמצא פה בקהל. איפה אנחנו ממוקמים? אז יש שני סייטים מרכזיים לק ליי בישראל. אחד ביבנה, רובוטק, שנרכשה על ידי קליי לפני קצת יותר משנתיים. והשני במגדל העמק שאני מייצג בבהרצאה הזאתי. ובזה אני מסיים את ה הייט לבקראונד מה שנקרא ונעבור לדבר קצת יותר טכנית מה אנחנו עושים. אז קליי בגדול תעסקת בשני תחומים, באמת ב-100,000 רגל. דיפקטים, גילוי של דיפקטים ו ואינספקשן. ואתם רואים פה ישאי דוגמא ל דפקט קטן שמופיע בתוך איזשהו דוויס שכרגע מייצרים בתוך הסיליקון וזה מייצר פגם, זה יכול לפגוע בביצועים של וזה יכול גם להרוג את הצ'יפ בסופו של דבר. החלק השני של מה שנקרא מטרוולוגיה, מדידות. וזה בעצם להסתכל על וריאציות, להסתכל על גדלים, למדוד וים וגבהים ועומקים וחומרים בתהליך היצור. וזה החטיבה שאליה אני שייך ואם נהיה קצת יותר ספציפיים אז החטיבה שלנו, קליי OMD בישראל במגדל העמק מתעסקת באוברליי. אז בואו נסביר רגע מה זה אוברליי למי שלא למי שלא מכיר. אוברליי בסופו של דבר זה אליימנט בין שתי שכבות. אז אתם רואים בצד שמאל למעלה איזשהו מה שמוקף בעיגול בעיגול האדום. הפוינטר פחות יעיל פה כי יש פה שבעה מסכים, אבל העיגול האדום מסמן שגיעת אוברליי. כלומר יש איפשי בעיה בהדפסה, בעיה ביצור של ה של הדוויס ויש לנו איזשהו בין השכבות. וזה כמובן יכול לפגוע בביצועים של ה של הדוויס עד כדי עוד פעם להרוג אותו לגמרי. באמצע המסך פה אתם יכולים לראות דוגמא על איך זה נראה בטופ וויו, בהסתכלות מלמעלה. אז החלק העליון זה שיש אליימנט מלא בין השכבה הנוכחית לשכבה הקודמת. החלק התחתון זה מה קורה כשיש שגיאת אוברליי, יש ישאי תזוזה. וזה זה מייצר את ה את הפער הזה. בצד ימין הפרוסה העגולה שאתם רואים, זאת בעצם תוצאת המדידה שאנחנו מספקים. אז יש פה בעצם אילוסטרציה של ווייפר, ווייפר 300 מילימטר. וכל הווקטורים האלו זה בעצם שגיעות האוברליי או מדידת האוברליי ב-X ו-Y. אז יש פה וקטור לאורך כל הפרוסה. התמונה בצד ימין למטה, זאת בעצם המטרה שעליה אנחנו מודדים את האוברליי, אחד מסוגי המטרות, זאת נקראת מטרת איים. אתם רואים סריגים שמופיעים מופיעים אחד ליד השני. וכל ו וכל וקטור כזה בעצם נמדד סריג מהסוג הזה ונתן תוצאות מדידה. ואני מה שנקרא אחפור לעומק לגבי המטרות בשקפים הבאים. אז זה אוברליי ב-100,000 רגל. מה האתגרים? מה האתגרים של הלקוחות שלנו? אז אז יש אתגרים בסגמנטים השונים, כל סגמנט חווה אתגרים מסוג שונה. אני אתרכז כרגע בגרף שאתם רואים באמצע שיושב תחת הזיכרון, תחת הדראם, אבל האמת שהוא משותף גם ל גם ללוג'יק וגם במובן מסוים משותף ל-3D Nand. ובואו נסתכל רגע על ה על הגרף הכחול. הגרף הכחול מייצג בעצם את הדרישה, את האו, את האונפורד, אוקטוברליי. בעצם את השגיעה שהלקוחות שלנו מרשים שתהיה באוברליי. התקציב השגיעה המלא. ומה שאנחנו רואים בציר X זה בעצם הדיזיין רוול השונים, ההתקדמות לאורך השנים של הדוויסים. אם לפני מספר שנים זה היה 20 ומשהו ננומטר, זה השניים הזה שמציין. וזה יורד ל-1 ומשהו ננומטר, 15, 12, וממשיך הלאה. ואנחנו בתור אלה שמספקים את הציוד המדידה, כמובן נדרשים לבצע מדידה הרבה יותר מדויקת מסך כל השגיעה. אם השגיעה היא 6 ננומטר אז אם אנחנו מודדים בטעות של ננומטר שתיים, כנראה שאפשר לחיות עם זה. אבל אם השגיעה שמותרת היא עד 2 ננומטר, ברור שהמדידה שלנו צריכה להיות ברמה של סאב ננומטר. כן, סאב ננומטר לא התבלבלתי. אז אז קצת סקאלה על הבעיה, אז שמענו בהרצאה הראשונה על TSMC. אז האמת שכמו שראינו הם כבר בעצם, בעצם TSMC כבר מריצים 5 ננומטר לפרודקשן. זה כבר לא דלופמנט, זה כבר מתחיל פרודקשן. וכח נותנים לכם את הסקאלה פה למה זה שווה. מה זה אומר על האוברליי באדג'ט על מה שאנחנו צריכים לספק? 1-2 ננומטר, תלוי כמובן בשכבה, זה הסדר גודל. ומה זה אומר על המכונות שאנחנו מספקים? זה אומר שהרזולוציה ובשקף הבא אני אסביר קצת יותר לעומק. אבל זה אומר שבעצם הנתון הסטטיסטי שאנחנו צריכים לספק, המספרים עצמם, זה באזור האנגסטרם. שזה בהחלט דבר מרשים ודורש הרבה הרבה מאוד השקעה בפיתוח. אז אז בוא אני אדבר קצת על המספרים האלו ובעצם על על למה הם חשובים ואחר כך זה יתחבר ל למטרות החדשות שאני אציג. אז פה אתם רואים דוגמא לאחת המכונות הכי מתקדמות שלנו, סטייט OF די, שנקרא ארצ'ר 750. ויש פה רשימה של פרמטרים שאנחנו נדרשים להגיע לביצועים האלו. אני אתאר אותם ככה בקיצרה. הראשון זה הפריסיז'ן, פריסיז'ן זה פשוט חזרתיות. מודדים ויפר שלם, מסתכלים על התוצאות, עכשיו כמודדים אותו עוד פעם, אותו ויפר על אותה מכונה. וכו וכו, ככה הרבה מאוד פעמים, ומסתכלים על הסטטיסטיקה של זה. סטטיסטיקה התוצאות צריכה להיות כמובן מקרה אידיאלי יש אפס טעות, זה חוזר על עצמו כל פעם. אנחנו מוכנים לקבל טעות של סרי סיגמה של 1 אנגסטרם. טול מצינג זה ניסוי מאוד דומה, רק הפעם במקום לחזור על אותו על אותה מכונה. לוקחים את הווייפר ממכונה א', אותו ווייפר, מעבירים למכונה ב' ומשווים את התוצאות בין שתי המכונות. פה אנחנו מקבלים מוכנים לקבל שגיעה של שני שני אנגסטרם, עוד פעם 3 סיגמא. טול shift מה שנקרא טיס, זה השגיעת המדידה שהמכונה שלנו בעצם מכניסה. כשמודדים בין שתי שכבות. אם מסובבים את המטרה ב-180 מעלות, בעצם אמורים לקבל את אותו מספר עד כדי סימן כמובן, כי זה מספר יחסי. אז זה ניסוי שעושים פה. לוקחים את הפרוסה, מסובבים אותה ומודדים את ההבדל אחרי הסיבוב. והשגיעה צריכה להיות עוד פעם קטנה משני אנגסטרם. וטול זה כל השגיעות ביחד בעצם. בגדול כל השגיעות ביחד, אנחנו מוכנים לקבל סדר גודל של שני אנגסטרם 3 סיגמא. וכמובן חשוב לציין שהתהליך הזה צריך לקרות בזמן של פחות מ-200 מיליסקנד למדידה. כשמדידה זה אומר ללנוע למטרה, למדוד אותה, לספק את התוצאות החוצה ולעבור למטרה הבאה. סדר גודל של 200 מיליסקנד וזה כמובן בגלל העלות. אנחנו רוצים שהעלות תהיה אפורדבל. מה שאתם רואים למטה זה שני סוגים של מטרות, אחת מהם כבר ראיתם קודם. זאתי שנראית כמו שתי קופסאות, נקראת בוקס בוקס והשנייה זה זה מטרת איים, זה סריגים. כשצבע אחד בתוך המטרה זה בעצם השכבה הקודמת והצבע השני זה השכבה למעלה ואנחנו בודקים את ה ביניהם. אז איך זה עובד? בוא ניקח רגע דוגמא, איך מודדים אוברליי. יש לנו שתי שכבות, השכבה למעלה לצורך העניין במקרה הזה נניח הכחולה ולמטה זה ה זה החומה. מחפשים מחשבים את מרכז המסה של ה של הקופסה הזאתי, מחשבים את מרכז המסה של הקופסה השנייה. וטדאם, יש לנו את האוברליי בין שתי הקופסאות. כמובן שזה סימפליפיקציה מאוד סימפליפיקציה של המדידה עצמה, אבל בגדול ככה זה עובד. נשמע פשוט. זה כמובן מסתבך. אז אז אז בבסיס יש את שתי המטרות מהסוג הזה, מטרות בוקס בוקס ומטרות איים. אתם יכולים לראות עוד משהו מאוד אופייני על המטרות שלנו. יש יותר סלים ממה שצריך בשביל למדוד אוברליי. ויש סימטריזציה מלאה של המטרה, וזה כמובן נועד בשביל להקטין את השגיעות. ככל שיש יותר סימטריזציה זה מעיף שגיעות סיסטמטיות שחוזרות במדידה ועל ידי זה אנחנו מתגברים עליהם. ושתי המטרות האלה בעצם זה המטרות שרצות בפאבים ב-15 שנה האחרונות, אפילו אפילו יותר. ומספקות את בעצם זה הבנצ'מרק למדידת אוברליי בימינו. וזה עובד טוב, וזה עובד טוב, אבל גם זה מגיע לקצה. ואם החבר'ה בגוגל רוצים כל שלושה וחצי חודשים כפול 2, אז אנחנו עושים את המאמץ שלנו. עומלם כל שלושה וחצי חודשים זה קשה, אבל אנחנו גם מנסים להביא כפול 2 כל איזשהו זמן. ובעצם באו באו דרישות ששלחו לקוחות לכיוון הזה. אחד זה קודם כל הדוויסים קטנים, אז אנחנו צריכים שהמטרות שלנו יהיו נתנות להדפסה בכלל. ושהם לא יהבו איפשהו קונטריינט, כלומר צריכים להקטין את הפיץ' את המחזור שמדפיסים. זה אחד. ושתיים מבקשים, הלקוחות שלנו מבקשים בעצם פרופורמנס יותר טוב. פריסיז'ן, טילס, כל הכל המילים האלו שאמרתי קודם. ופה הגיע בעצם הפיתוח החדש, ה נוביליטי, שזה ה המרכז של ה של ההרצאה הזאתי. המטרות האלה נקראות rAIM, רובס AIM או בשם הפיזיקלי בעצם זה מטרות מוערה. אם נסתכל על המקרה הכללי, מה שאתם רואים פה, בניגוד לשקפים הקודמים, אתם רואים בעצם סריג מעל סריג. המבנה הכללי הוא עוד פעם מספר סלים, אבל מה שחשוב להסתכל פה על ה-PQST, שזה המקרה הכי כללי. יש לנו ארבעה סריגים במחזור שונה שניצב ניצבים אחד מעל השני בשני זוגות. ואני אסביר בשקפים הקרובים איך זה בעצם משפר משמעותית את מדידות האוברליי. ועם כמה בונוסים נוספים. אז בואו נבין רגע מה זה מוראה, למי שלא יצא לו לראות קודם מוראה. אז תודות לויקיפדיה, כרגיל. אז מוראה מסתבר שזה גם במתמטיקה ובפיזיקה, שזה ידענו כולנו ידענו את זה לפני זה, אבל זה גם באומנות מסתבר ויש אפילו מוזיאון שמתעסק במוראה, למי שרוצה אחר כך לחפש בגוגל. אז אז אז מה זה מוראה? מוראה זה בעצם אינטרפרנס. לרז סקייל אינטרפרנס בין שני סריגים. מה שחשוב לשים לב שהסריגים האלה צריכים להיות עם איזשהו בעצם מחזור קצת שונה ובאיפשי הזזה בין אחד לשני. ואתם רואים פה שתי דוגמאות, אחת זו דוגמא ל סריגים עגולים. והדוגמא השנייה זה ה דוגמא לסריגים ישרים. עכשיו אם תתרכזו בדקה הקרובה, הבנתם את כל ה את כל ההרצאה הזאתי. תסתכלו על הסריגים הישרים. ומה שאפשר להבחין זה שתנועה יחסית איטית או קטנה של הסריג העליון. תסתכלו איך הוא זז ככה יחסית לאט. זה מתורגם ישר לתנועה מאוד מאוד מהירה של האינטרפרנס. כלומר תנועה קטנטונת, פתאום אנחנו רואים איפשהו תופעה פיזיקלית שמקבלת אמפליפיקציה מאוד מאוד גדולה. עכשיו למה זה סופר חשוב? כי זה בעצם האוברליי. אנחנו עכשיו כשאנחנו באים למדוד ועכשיו אני מסתכל על מקרה קצת יותר פרטי, יש לי שני סריגים P ו-Q ו-Q מעל P. הם מגדירים איזשהו מוראה פיצ', אפשר לחשב אותו, נוסחה פשוטה. והאסנס של כל האירוע הזה, שזה מגדיר גם איזשהו אמפליפיקציה או גיין פקטור כמו שאנחנו קוראים לו. בעצם מה זה אומר? אם ניקח את הדוגמא הזאתי, אז בוא נניח שיש איפשי הזזה באחד הסריגים, נניח של 100 ננומטר, מספר אסטרונומי אבל רק בשביל הדוגמא. אז הזאתי של ה-100 ננומטר, במקרה הספציפי הזה יתורגם בעין או במיקרוסקופ לתזוזה של 800 ננומטר. וזה כבר עולם אחר. זה כבר משהו שהרבה הרבה יותר קל לתפוס וזה משפיע ישר באופן מיידי על כל משטר הטעויות. בנוסף לזה יש פה עוד איזשהו יתרון. אפשר לעבוד פה בעצם עם פיצ'ים, עם מחזורים הרבה יותר אדוקים. 300-500 ננומטר במיקרוסקופ נראה, מה שבדרך כלל היה לא נראה במיקרוסקופ רגיל, פתאום אפשר לראות אותו. וזה הופך את המטרות שלנו להיות הרבה יותר ידידותיות למשתמש ול ולמי שמדפיס אותם. אז אז אם עכשיו עושים את כל המתמטיקה הזאתי ויש שני סריגים, אז אני לא אעלה אותכם בכל הפרטים. מסתכלים על זה, אז הדוגמא הספציפית הזאתי ששמתי פה, שהיא די טיפית של של מספרים טיפיקליים. מקבלים איזשהו גיין פקטור, איזושהי הגדלה, בסדר גודל של 15 במקרה הזה. אז אתם רואים פה באמת דוגמא אמיתית לאיפשי מדידה של מטרה בתוך הריבוע הצהוב רואים איפשהו פאטרן מחזורי, קצת קשה לראות אותו. זה עוד לא סופר אופטימלי, אבל גם עם הפאטרן הזה ה בעצם כל מדידה שנעשה, יש פקטור 15 על הביצועים שלה. וזה כמובן סופר סופר חשוב. אז מה שעשינו אחרי שהעברנו את ה את התיאוריה, כמובן שהשלב הבא הוא לעשות סימולציות קצת יותר רציניות כמו שאומרים. אז יש לנו כל מיני כלים בחברה שפותרים בעצם את משוואות מקסוול בצורה מלאה. והטול הזה בעצם משמש אותנו לעשות הערכה ולתכנן מטרות ב גם לעצמנו וגם אחר כך לפאבים. ויש פה איפשי דוגמא, אילוסטרציה של הסימולציה הזאתי, בעצם אפשר לתכנן את המטרה על פי כל הפרמטרים של ששאנחנו יודעים על על הליירים השונים. ועל המכונות שלנו ולעשות איזשהי אופטימיזציה גלובלית. ובאמת רצנו קצת לא קטן כזה של סימולציות. ואתם יכולים לראות פה בעצם שתי דוגמאות, הדוגמא העליונה, הדוגמא למעלה בעצם זה מטרות רגילות, הדוגמא למטה זה מטרות מוערה, rAIM. והגרפים שמופיעים זה בעצם גרפים של סוג של קונטרסט ש כמה שיותר נמוך במקרה הזה יותר טוב. ואנחנו תוך כדי סימולציה בעצם, המחקר הזה הראה לנו שהמטרות האלה לא רק שהם מעצימות כל מיני תופעות. הם גם פחות רגישות לווריאציה בפוקוס ויש להם עוד איזו שהם פרמטרים של יציבות שהיא מאוד מאוד טובה לטובת ה לטובת השימוש במדידות אוברליי. זהו, בשלב הזה, בשלב הזה עוד דקה אחרונה, הגענו לתוצאות בדיוק בזמן. התוצאות אז עכשיו כמובן הדפסנו כאלו מטרות ומדדנו אותם ואתם יכולים לראות פה את המטרות בחום המטרה המקורית ובירוק המטרה החדשה. שלמרות שבעין נראה קצת פחות טוב, הביצועים עצמם בכל הפרמטרים שהסברתי קודם פקטור 2 ככה רק להתחלה. וזה לפני שעשינו את כל האופטימיזציות המלאות, שזה כמובן מאוד מאוד מבטיח. אז אז אני אסכם בזאת ואני אגיד שא' באמת חגיגה להיות פה ולהיות שותפים בתוך כל מה שקורה פה ולאפשר לאפשר לגלגל הזה להמשיך להתקדם. ראיתם פה דוגמאות ל למה אוברליי נהיה כל כך קריטי לפאבים ודוגמאות לאיך אפשר לשפר. וכמובן שיש פה עוד הרבה עבודה לגרום לזה להיות חלק מה-HVM ולהמשיך לעבוד על המטרות הבאות. אני אדלג על הסרטון ואני אלך לשקף האחרון ואני רק אגיד עוד פעם שבעצם היום אם תשפו מהכיס את הטלפון או כל דוויס שאתם מסתכלים ועובדים איתו. כמעט כולם, המכונות פה מקליי ישראל ממגדל העמק ראו אותם באיזשהו שלב ועזרו לייצר אותם. וזה באמת גאווה בכל הרמות. זהו, תודה רבה שהקשבתם.
New Technologies for Advanced Overlay Applications, Dr. Ido Dolev, KLA (ChipEx2021)
ChipEx Channel
20m 28s2,445 words~13 min read
AI audio transcription
Transcript source
AI audio transcription
This transcript was generated from the video's audio because no usable YouTube caption track was available. The transcript below is server-rendered so it can be read, searched, cited, and shared without opening the original YouTube player.
Pull quotes
[0:00]יש עוד הרבה אנשים ברקע שעובדים על זה, אבל בייחוד שווה להזכיר את דוקטור יואל פלר ודוקטור מרק גינובקר מכאלה שזה זה זה את רוב עבודתם.
[0:00]אני ארוץ ככה מאוד בזריזות ואני אני אציג את קיי ליי, אני לא בטוח שכולם פה מכירים.
[0:00]שתיים שלוש דקות נציג את קיי ליי, את האתגרים שעומדים בפנינו וקיי ליי ישראל ספציפית.
[0:00]ומבחינת השקעה בR&D אז התייחסו לזה בהרצאה הקודמת, בארבע שנים האחרונות באזור השלושה ביליון דולר.
Use this transcript
Related transcript hubs
Watch on YouTube
Share
MORE TRANSCRIPTS


