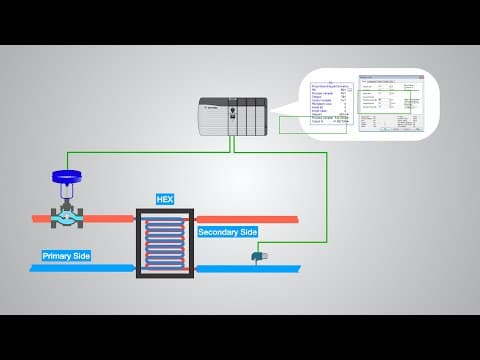
[0:05]Hello everyone. Welcome to Engineering and Automation YouTube channel. In our last video, we learned about the automatic control systems such as open loop control system and closed loop control system. Also, we learned about the importance of a feedback element in a closed loop control system. In today's video, we will learn about the PID controller, which is the most popular and most widely used closed loop control system in all of our control applications. The term PID stands for P proportional, I integral, and D derivative. We will see in detail about each of these parameters and how it affects the control system. The block diagram of a closed loop control system with PID controller is shown here, where the proportional, integral and derivative controllers are combined together to provide a stable controlled output. Mathematically, the PID controller is expressed as follows. This is only for information and we will not go through any mathematical calculations in this video. In this equation, KP represents proportional gain, KI represents integral gain, and KD represents derivative gain. The PID controller can be used in the following three combinations. First one is the P controller, that is the proportional controller. As the name sounds, only proportional gain is used. Next is the PI controller, proportional integral controller. In this, proportional and integral gain is used. Final combination is the PID controller. In this proportional, integral and derivative gains are used. Now, we will go through each of these combinations in detail and understand why PID combinations are widely used. First one is the proportional controller. The proportional controller generates the control output, which is proportional to the current error of the system. The error is determined by the difference between the process variable and the set point. As the formula states, the error is multiplied with the proportional gain to provide the controlled output. For example, let's consider a room with temperature of 28 degree Celsius, and the desired set point is 24 degree Celsius. In this, the error is 4 degrees and assume a proportional gain of 10, then the control output will be 40. In general, increasing the proportional gain will increase the speed of the control system. Also, the steady state error will be reduced. However, the proportional controller will not eliminate the steady state error. If you are wondering, what is the steady state error? The steady state error is the difference between the desired controller response and the actual controller response. If the proportional gain is increased to a larger value, in order to reduce the steady state error, the control output will start to oscillate. And further increasing the proportional gain will make the system unstable. Next is the PI controller. Due to the limitations in the proportional controller to eliminate the steady state error, integral controller is needed to eliminate the steady state error. The integral component will sum the error over time. The result is that even a small error will cause the integral component to increase slowly. The integral response will continually increase over time unless the error is zero. So the effect is to drive the steady state error to zero. Typically, in PI controller, there is some decreased stability due to the presence of the integral mode. That is, the addition of the integral mode makes the total loop slightly less stable, also produces high overshoot. Final is the PID controller. As the PI controller does not have the capability to predict the future behavior of error, so it reacts normally once set point is changed. Introducing the derivative controller overcomes this problem by anticipating the future behavior of the error. Its output depends on the rate of change of error with respect to time multiplied by the derivative gain. The PID controller has the optimum control dynamics, including zero steady state error, fast response, that is short rise time, no oscillations and higher stability. The necessity of using a derivative gain component in addition to the PI controller is to eliminate the overshoot and the oscillations occurring in the output response of the system. As we see in all three combinations of P, PI and PID, PID controller has higher stability and no oscillations. Hence PID controllers are most commonly used in all control applications. In modern PLCs, the PID control function is pre-programmed and available for ready use for any applications. Let's take an example of a heat exchanger where the secondary side chilled water supply temperature needs to be maintained. So, the secondary side supply temperature is the process variable and the desired temperature is the set point. In order to maintain the set point, the PLC controller will continuously monitor the secondary side temperature and actuate the control valve actuator on the primary side to maintain the desired set point. The PLC will have a PID controller in order to have optimum control of the heat exchanger secondary side temperature. To achieve a highly stable and fast responsive control, the KP, KI and KD values must be selected carefully by the controls engineer. The process of arranging these three parameters to their optimum values in order to obtain desired control response is referred to control loop tuning or PID tuning, which we will be seeing in detail in our next video. Finally, let's see about the advancements in control system. The control systems have evolved further than the PID controller, when the plant dynamic characteristics are unknown and unpredictable. Nonlinear controllers such as adaptive control, fuzzy logic control and neural networks are used. Adaptive control is a controller that can modify its behavior in response to changes in the dynamics of the process and the disturbances. Fuzzy logic control is actively used in research activities, particularly in control applications. Next is the neural networks. Artificial neural networks have emerged from the studies of how brain performs. That's all for today's video. I hope you guys have learned something useful from this and thanks a lot for watching this video. If you guys like the contents of this channel, please consider subscribing to our channel and click the bell icon to enable notifications. Please leave your feedback and suggestions in the comment section. Also, please like this video, share this video with your friends and subscribe to our YouTube channel. Thank you.
Why use a PID Controller? Proportional, Integral, & Derivative (with BMS Examples)"
Engineering & Automation
7m 32s1,055 words~6 min read
AI audio transcription
Transcript source
AI audio transcription
This transcript was generated from the video's audio because no usable YouTube caption track was available. The transcript below is server-rendered so it can be read, searched, cited, and shared without opening the original YouTube player.
Pull quotes
[0:05]In our last video, we learned about the automatic control systems such as open loop control system and closed loop control system.
[0:05]Also, we learned about the importance of a feedback element in a closed loop control system.
[0:05]In today's video, we will learn about the PID controller, which is the most popular and most widely used closed loop control system in all of our control applications.
[0:05]We will see in detail about each of these parameters and how it affects the control system.
Use this transcript
Related transcript hubs
Watch on YouTube
Share
MORE TRANSCRIPTS